KUKA机器人培训--KUKA机器人外部自动运行配置方法
一、不通过程序号而选定好要运行的程序的外部启动机器人
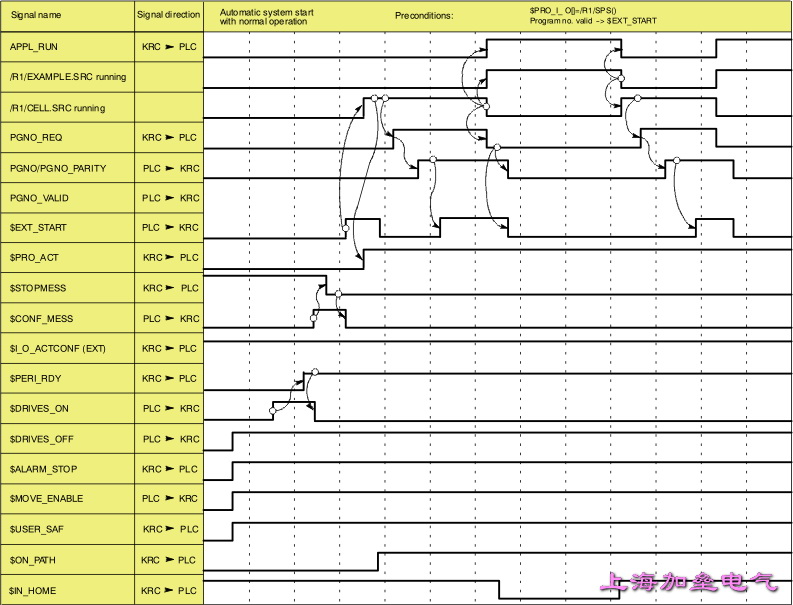
通过下列步骤来外部启动机器人:
步骤1、在T1 模式下把用户程序按控制要求插入cell.src 里,选定 cell.src
程序,把机器人运行模式切换到 EXT_AUTO.
步骤2、在机器人系统没有报错的条件下,PLC
一上电就要给机器人发出$MOVE_ENABLE (要一直给)信号。
步骤3、PLC
给完 $MOVE_ENABLE 信号500ms
后再给机器人 $DRIVERS_OFF (要一直给)信号。
步骤4、PLC
给完 $DRIVERS_OFF 信号500ms
后再给机器人 $DRIVERS_ON 信号。当机器人接到$DRIVERS_ON 后发出信号 $PERI_RDY 给PLC,当PLC
接到这个信号后要把 $DRIVERS_ON 断开。
步骤5、PLC 发给机器人 $EXT_START (脉冲信号)就可以启动机器人。
二、通过程序号(不校验奇偶)来选定程序的外部启动机器人
需要配置的信号:
PRNO_FBIT:表示位字节的第一位。例如,用 $IN[11]
---$IN[17] 来映射给变量 PGNO,这时 PRNO_FBIT
为11,意思是 PRNO_FBIT
是这个区域的第一位。
PGNO_LENGTH:表示映射给变量PGNO
的数据长度,以上例来说,这时 PGNO_LENGTH
为7,变量 PGNO
最大值为127。
PGNO_PARITY:程序号奇偶位校验,没有特别要求,不需要校验的话该值设置为0。
PGNO_VAILD:程序号有效,机器人信号输入端的位信号。把位信号编号编写在其后面,如,用$IN[18]来表示此程序号有效的话,当$IN[18]为 TRUE
的时候,PLC
发过来的程序号才有效。PGNO_VAILD 是个脉冲信号(脉宽1 秒左右)。每次改变程序号时,PLC
都要让 PGNO_VAILD
为TRUE.否则机器人端的变量 PGNO 的值不会发生改变。
PGNO_REQ:机器人发给 PLC
的程序号请求信号,位信号。
准确配置完以上信号后,通过下列步骤来外部启动机器人:
步骤1、在T1 模式下把用户程序按控制要求插入 cell.src 里,选定 cell.src
程序,把机器人运行模式切换到EXT_AUTO。
步骤2、在机器人系统没有报错的条件下,PLC 一上电就要给机器人发出 $MOVE_ENABLE (要一直给)信号。
步骤3、PLC
给完 $MOVE_ENABLE 信号500ms
后再给机器人 $DRIVERS_OFF (要一直给)信号。
步骤4、PLC
给完 $DRIVERS_OFF 信号500ms
后再给机器人 $DRIVERS_ON 信号。当机器人接到$DRIVERS_ON 后发出信号 $PERI_RDY 给PLC,当PLC
接到这个信号后要把 $DRIVERS_ON 断开。
步骤5、PLC
发给机器人 $EXT_START (脉冲信号)就可以启动机器人。
步骤6、当 PLC 接收到机器人的反馈信号 PGNO_REQ 后, PLC 要把程序号发给机器人。
步骤7、当 PLC
发出程序号500ms
后,PLC
发给机器人 $ PGNO_VAILD (脉冲信号,脉宽约1000ms),以便让机器人的变量PGNO
值生效。
如果生产过程切换程序号的话,重复步骤6 和步骤7。
外部停止机器人和停止后启动机器人:
停止机器人:断掉信号 $DRIVERS_OFF,这种停止是断掉机器人伺服。
停止后继续启动机器人:重复步骤3、4、5
就可以启动机器人。
三、机器人故障复位方法:
当机器人有“确认信号”(故障)时,PLC
发给机器人 $CONF_MESS (脉冲信号)就可以复位。
通过外部自动启停,复位机器人的信号需要在示教器里配置,路径:
登陆用户组 “Safety
Maintenance”权限---配置---外部自动运行---把输入端和输出端的信号配置完成。
四、机器人输出常用信号
1、$ALARM_STOP(机器人急停信号) 正常时该信号逻辑为1,当机器人急停被按下时逻辑为0。
2、$RC_RDY1(控制柜就绪) 正常时该信号逻辑为1,当机器人有“确认信息”时逻辑为0,“确认信息”被确认后,逻辑为1。
3、$PRO_ACT 机器人在运行程序时输出为1。
4、$IN_HOME 机器人在HOME 点时输出为1。
- 上一篇:没有啦
- 下一篇:ABB机器人培训--ABB机器人ProfiNet通讯配置 2018/9/22